The Manoeuvre with the Azipods Copy
The Azipods, Schottles or similar systems, oriented independently, significantly change ship handling. Ships equipped with these new azimuth systems are very manoeuvrable, as they can combine the push or pull of the pods to create vector forces that permit the hull to move in any direction.
The azipods, in particular, allow great powers and have spread on Cruise ships where the importance is not so much the cruising speed. Still, the safety and comfort during low-speed manoeuvres in confined spaces and not particularly deep waters or in remote ports where there are no tugs of adequate power.
Given the magnitudes involved, the thrusters’ appropriate and gentle handling is crucial, as the available powers can generate important moments and dangerous vibrations.
Operating the azipods assumes some knowledge of the type of system used. In a traditional ship, we act on the tiller to starboard, thus rotating the rudder to starboard; when we are in the presence of pods, turning them to starboard produces the opposite. We can create even more confusion if we use pods independent of each other.
One ship’s pod can create longitudinal movement while the other makes the stern rotate or direct the flows to make the vessel translate. The combinations are many and are not intuitive. Furthermore, depending on the system’s manufacturer, different terminologies may mean the same operational aspect or, again, the same types of systems may work slightly differently.
Handling these modern ships is challenging, and it is necessary to have attended specific manoeuvring courses to be consolidated and perfected with a lot of practice.
Given the above, we want to give as examples three ways to use the azipods, assuming a Passenger ship equipped with two aft driving pods – the most common configuration.
ABB instructions
- Cruise Mode – Navigation
- Soft Manoeuvring Mode – Manual manoeuvring
- Strong Manoeuvring Mode – Automatic manoeuvring
1. Cruise Mode
During navigation, the azipods work synchronised and oriented with a maximum angle of 35° – 40°, acting precisely like a conventional twin-propeller double-rudder ship. Power can be 100% available for top speed.
2. Soft Manoeuvring Mode
The azipod power during berth approaches is automatically limited to 50 – 60% of the total. The pods can be oriented independently. Generally, one of the two azipods provides thrust forward or backwards, and the other rotates to direct the stern like an adjustable stern thruster.
3. Strong Manoeuvring Mode
We can rotate the azipods through a joystick for mooring or unmooring. The command moves both pods automatically and independently at 360° to direct the thrust in all directions and obtain the desired movement. The power is automatically limited to 50-60% of the total. In jargon, ‘Strong Manoeuvring Mode’ is named “AZIMAN”.
Stopping a Ship Using Azipods
Stopping a ship equipped with azipods may not be intuitive either. First of all, compared to traditional correspondents, these modern ships need to maintain a higher speed to steer, especially when navigating in rough sea areas or with currents coming from the stern. It is mainly due to the flat shape of the stern.
Furthermore, at high speeds, reversing the rotation of the propellers could generate potentially dangerous loads for the shaft bearings; it is not recommended to use the typical “crash stop” (Stop and Full Astern!) If necessary, this must-do by reducing the power and switching to manoeuvring mode limits the risk of damaging the thruster.
The procedure described and recommended by ABB for its azipods consists of reducing the power by selecting the AZIMAN manoeuvring mode, orienting the pods between 35° and 45° and waiting for the speed to drop to 15 knots, bringing then the pods to 180° to reverse the thrust.
The power, at this point, can be adjusted to slow or completely stop the ship with superior stopping distances less than any other system.
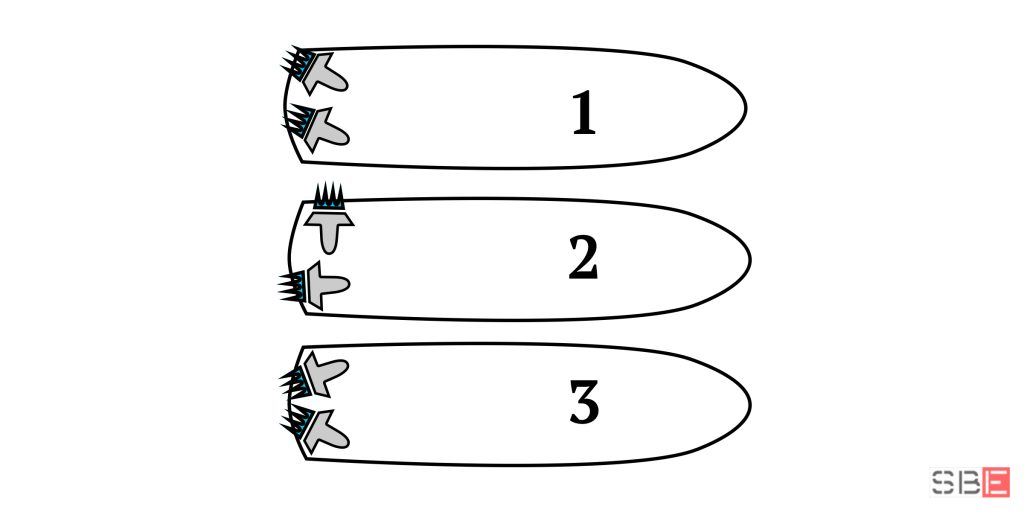
Below are the manoeuvres that we can perform with modern ACDs, taking into account that the controls on the bridge dashboard have a higher rotation speed that does not correspond to the pods’ actual rotation speed, which, in the best of cases, needs 20 seconds to make a 360 degrees rotation.
- 1 – Slow Ahead navigation
- 2 – Full Ahead navigation
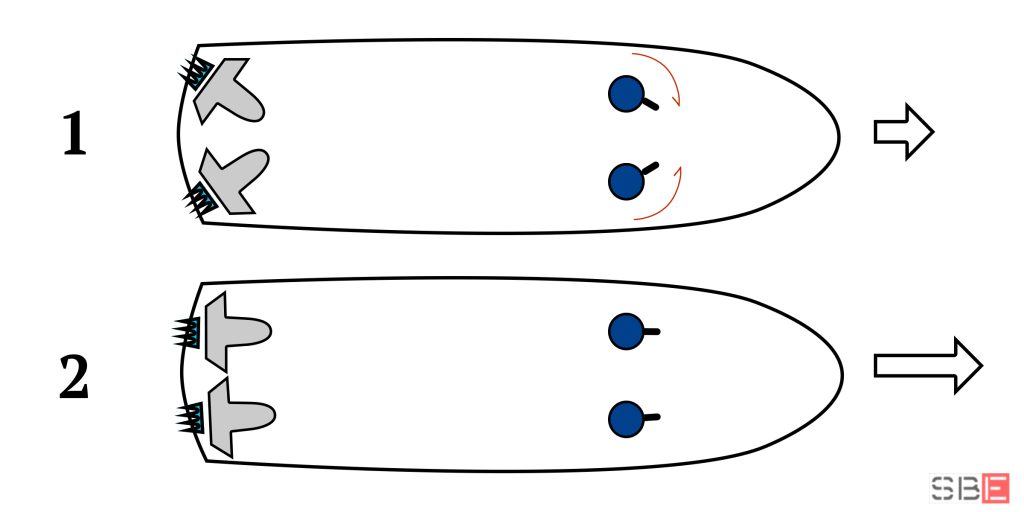
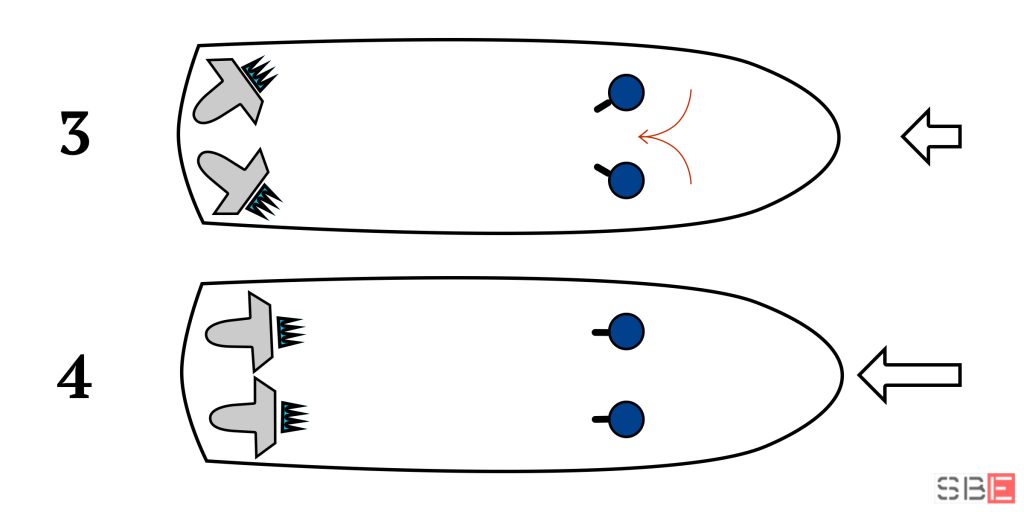
- 3 – Slow astern navigation
- 4 – Full astern navigation
The pods should preferably be rotated externally to avoid the opposite pod’s flows.
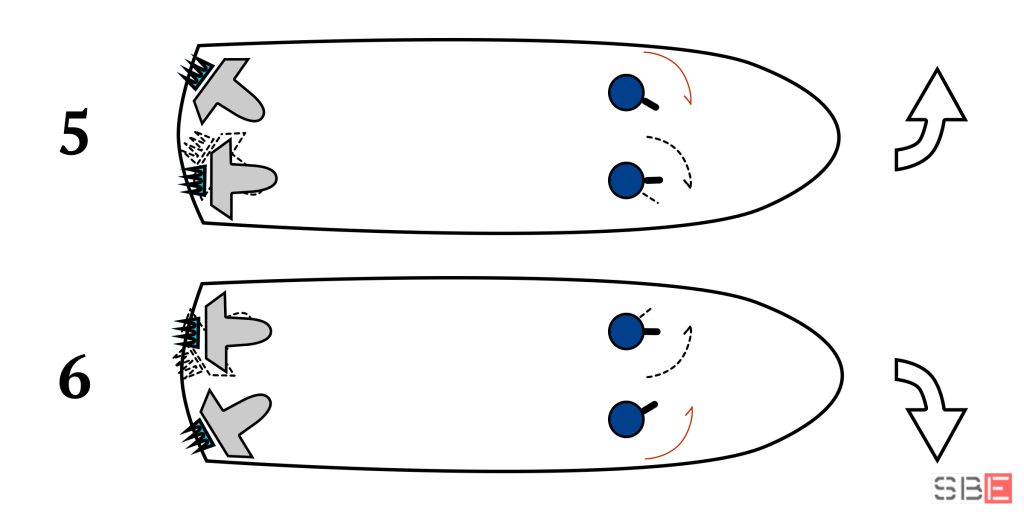
- 5 – Swing to port
- 6 – Swing to starboard
Always start by rotating the pod inside the curve to start turning, and you can then rotate the external pod to increase the thrust and decrease the radius of the turning circle.
- 7 – Shifting of the aft to port
- 8 – Shifting of the aft to starboard
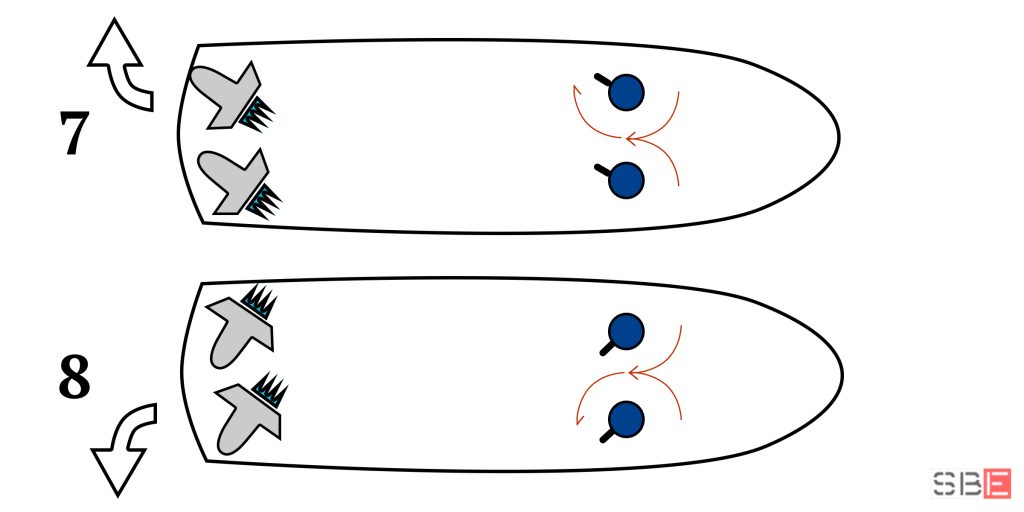
-
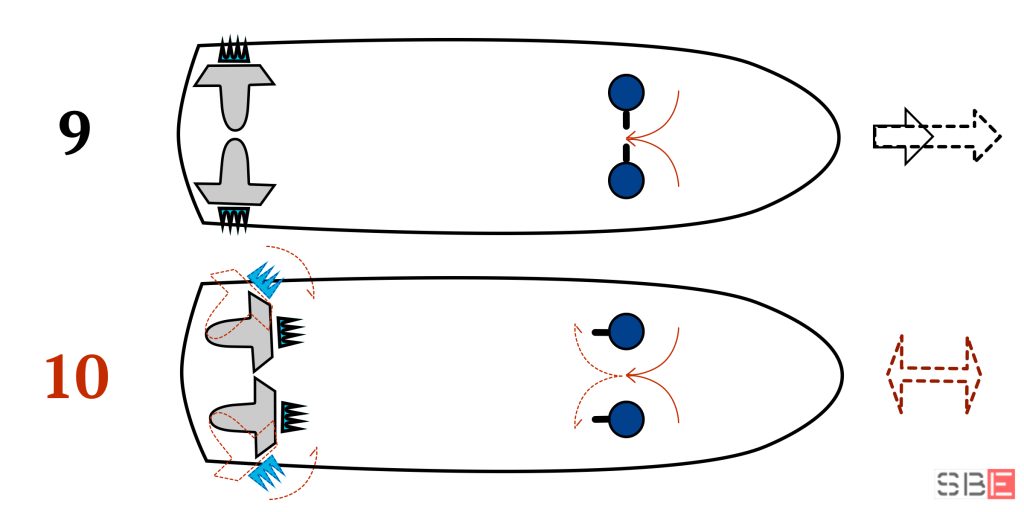
- 9 – Stopping of the vessel – Transverse Arrest TA
The pods are positioned at 90°. This configuration allows slowing the ship while maintaining control effectively.
- 10 – Emergency Arrest – Crash Stop
The power is automatically cut off by putting it in AZIMAN mode. The thrusters are oriented at 45° until the speed is reduced to 15 knots. The pods are rotated 180° in reverse motion. During the Crash Stop, the ship always maintains steerability.
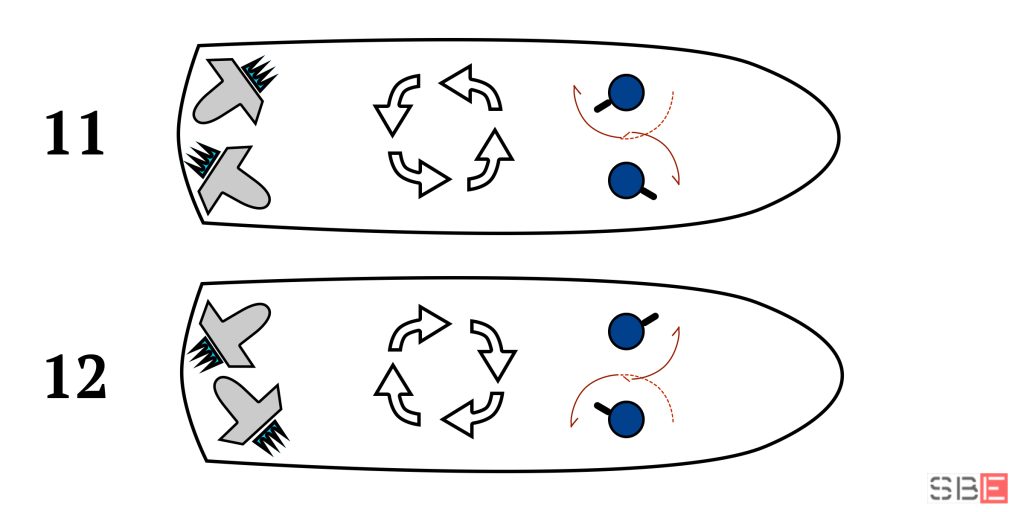
- 11 – Turning in place to port
- 12 – Turning in place to starboard
Prevent the slipstream of one engine from crossing with the slipstream of the other to avoid cavitation phenomena.
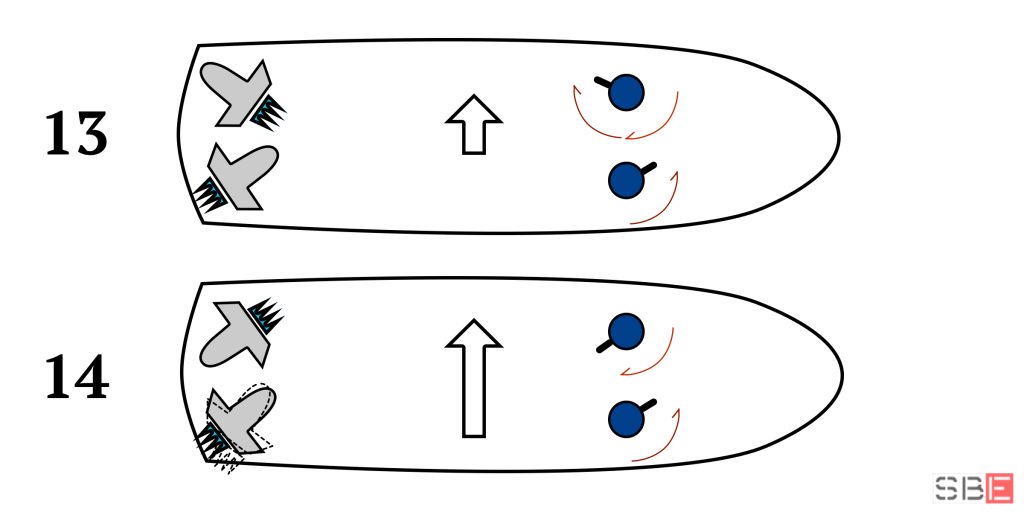
- 13 – Slow translation to port
- 14 – Fast translation to port
- 15 – Slow translation to starboard
- 16 – Fast translation to starboard

The translation requires fine adjustment. Generally, the tendency to move forward in slow movements must be compensated by increasing the thruster’s power backwards.
To translate quickly (fig. 14 and 16), the thruster placed on the side you want to move must be positioned towards the stern between 40° and 45° while the external thruster at about 20° in forwarding motion. The latter will be the one that will have to provide the most power and will be used to adjust the longitudinal movement by varying both the power and the angle.
The use of manoeuvring thrusters in the automatic manoeuvres can significantly change the procedure and orientation of the thrusters, which is why training in the use of azipods is essential and must be performed on the ship to be handled.